Auf dieser Seite wird die Entstehung und die Funktion eines elektromechanisch angetriebenen Kinderbettes vorgestellt, welches Kindern beim Einschlafen helfen soll.

Das fertige Bett
Allgemeines
Viele Kinder machen Phasen durch, in denen ihr Schlafrhythmus stark von dem der allgemeinen Bevölkerung abweicht und stellen damit auch die Eltern und deren körperlichen Schlafbedarf auf eine Probe.
Das Schaukeln bzw. Wiegen der Kinder hat oft eine beruhigenden Effekt und hilft, auch bei Erwachsenenm, oftmals beim Einschlafen. Bereits vor Jahrhunderten baute man also Kindewiegen um den Kleinsten den Schlaf zu ermöglichen.

Eine Wiege von früher (Public Domain)
Nun bedingen diese einfachen mechanischen Aufbauten, dass man entweder die natürliche Unruhe des Sprösslings nutzt oder man diese Bewegungsarbeit selbst verrichtet. Dies ist natürlich dem elterlichen Schlaf nicht unbedingt zuträglich. Auch die Größe einer solchen Schlafstätte ist eingschränkt, sodass Kinder über einem Jahr oft nicht mehr in diese hinein passen.
Nun wäre es doch interessant, auch Kleinkindern mit vollendetem ersten Lebensjahr diesen Komfort zukommen zu lassen.
Hier hilft die moderne Technik, insbesondere Bauteile, die eigentlich für den Bau von 3D-Druckern oder CNC-Maschinen gedacht sind. Diese sind gegenwärtig durch die fortschreitende Automation immer leichter und günstiger verfügbar.
Mechanik
Als Basis wurde Aluminium-Schnellbauprofil verwendet um eine relativ einfache Montage und gleichzeitig gute mechanische Stabilität und geringe Abhängigkeit von Umwelteinflüssen (wie sie bei Holzkonstuktionen entstehen können) zu gewährleisten. Alle selbst konstruierten Bauteile, die zumeist zur Adaption der Antriebs- und Lagerteile an die beiden verwendeten Profile dienen, sind aktuell als 3D-Druck ausgeführt, können aber auch ebenso als relativ einfache Frästeile hergestellt werden.
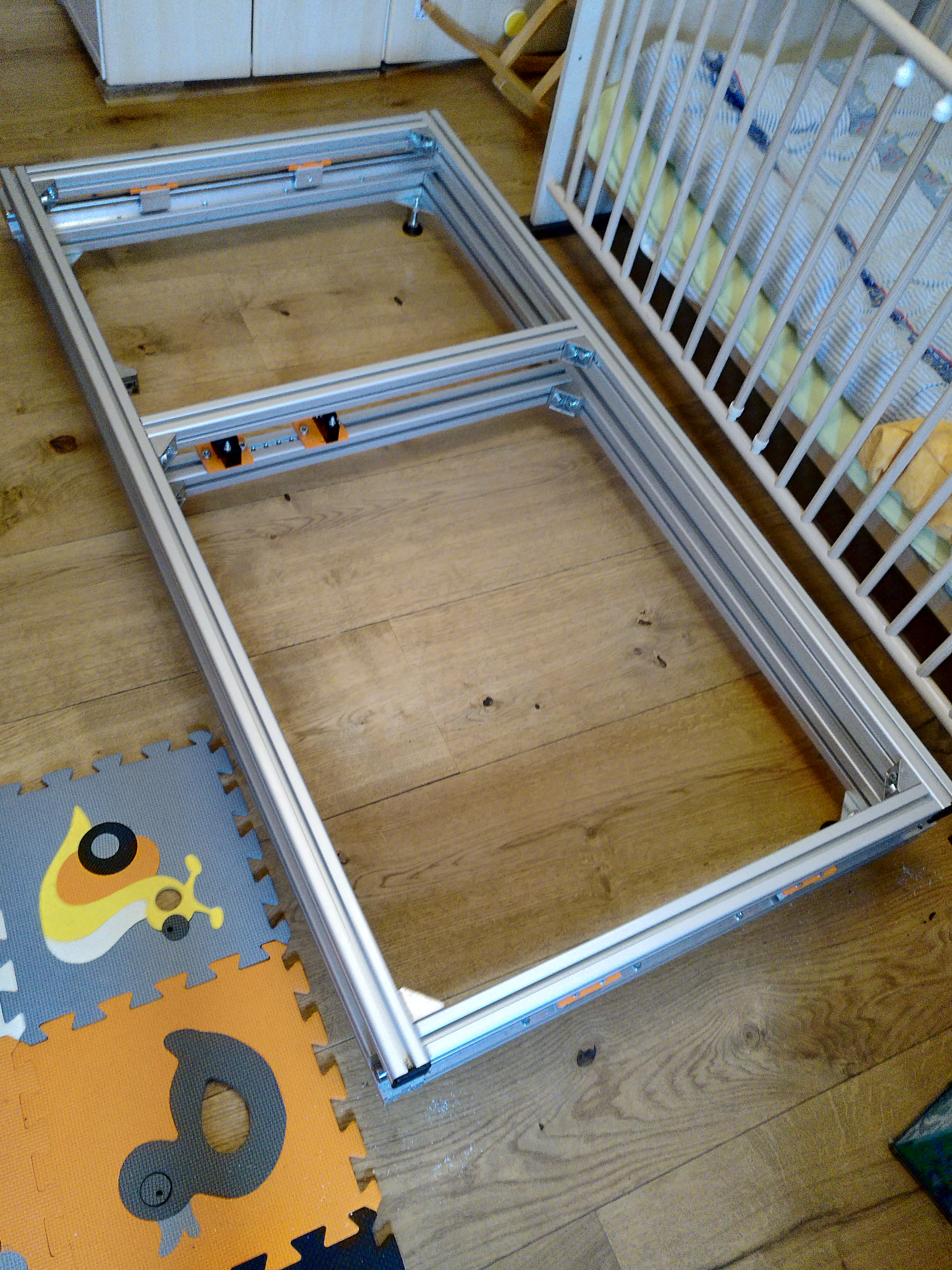
Die Rahmen noch ohne Bettgestell
Das bestehende Kinderbett wird auf einem zweiteiligen Leiterrahmen montiert. Ein Teil befindet sich auf dem Boden, dieser ist in 45mm-Profil mit Nut 10mm realisiert. Dieser kann mittels M12-Stellfüßen in der Höhe variiert werden, damit sind sogar die vier Zentimeter Gefälle im Altbau erträglich.
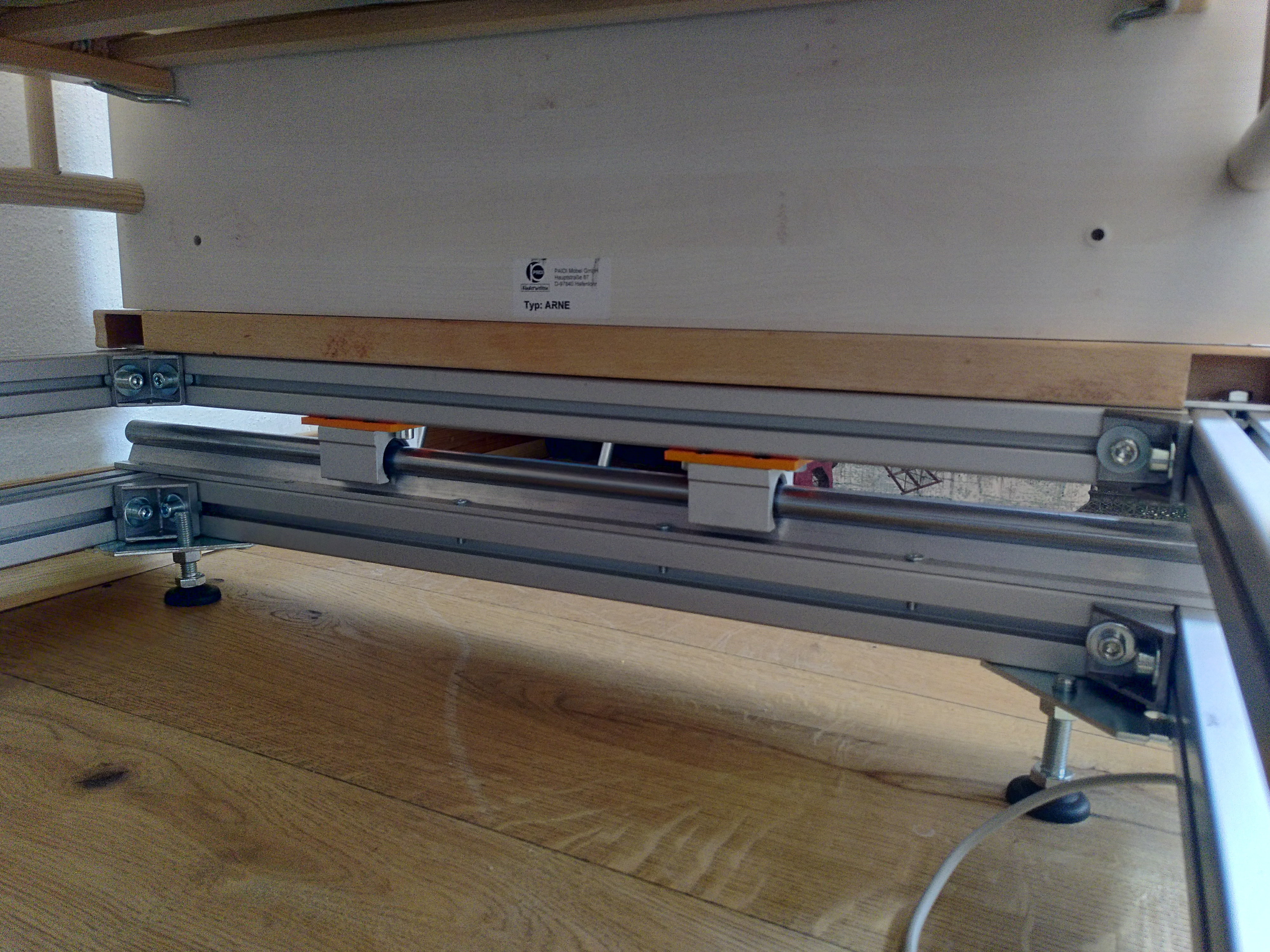
Montage des Bettes und der Lager
Der zweite Teil, aus 40-mm Profil mit Nut 8mm, ist am original Bettgestell mittels vier M8-Schrauben montiert. Beide Teile sind miteinander über zwei Linarführungen des Typs SBS20 und Linearlager des Typs SBR20LUU verbunden. Diese ermöglichen einen relativ leichten Lauf in der Querachse des Bettes.
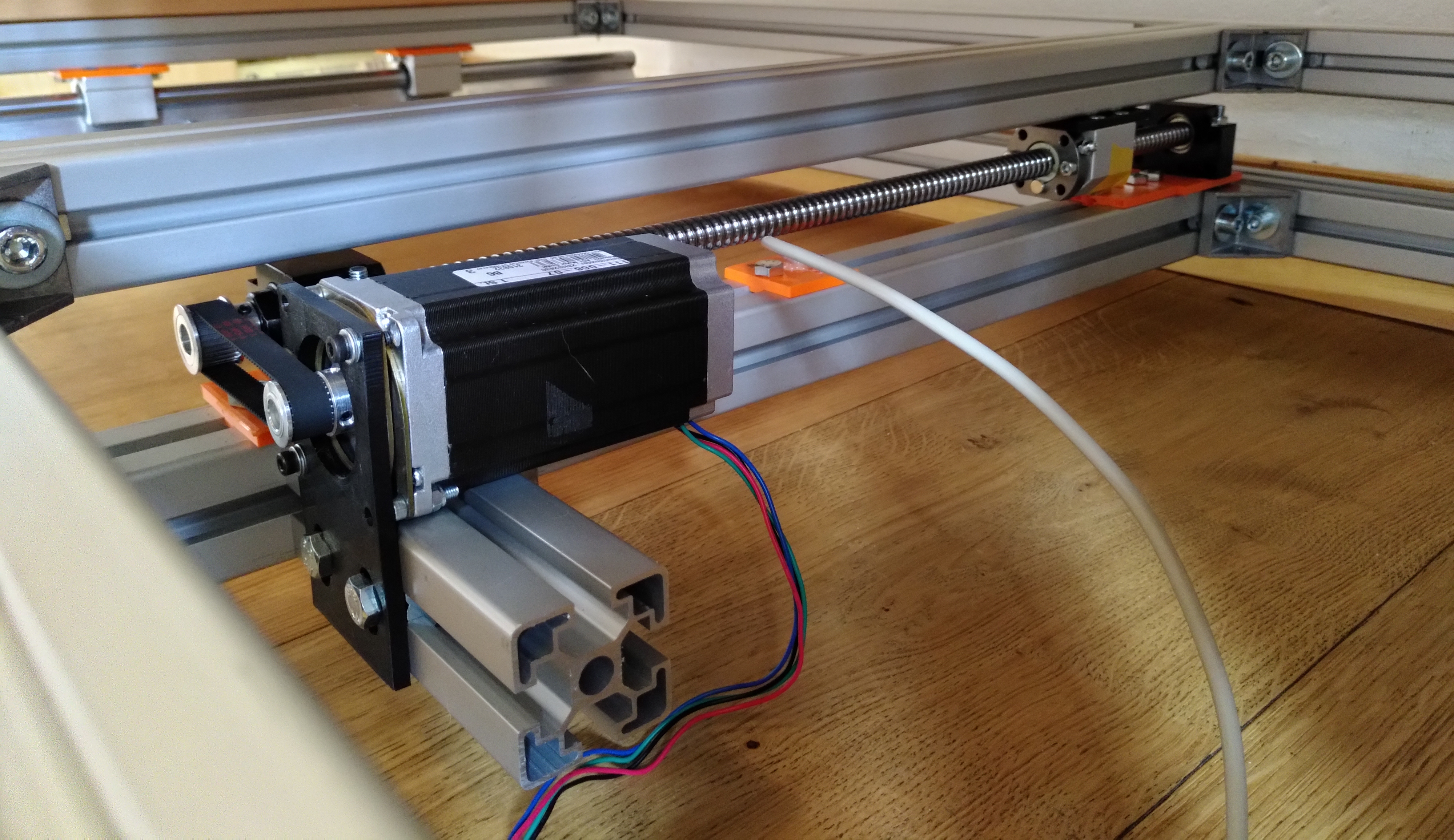
Antriebseinheit mit Motor, Zahnriemen und Spindel
Der Antrieb erfolgt über eine Kugelumlaufspindel des Typs SFU1605-3. Diese wird von einem Schrittmotor des Typs 23HS2430 (1,8 Grad/Schritt, 4.8V Nennspannung, 3A/Phase max.) über einen Zahnriemenantrieb angetrieben.
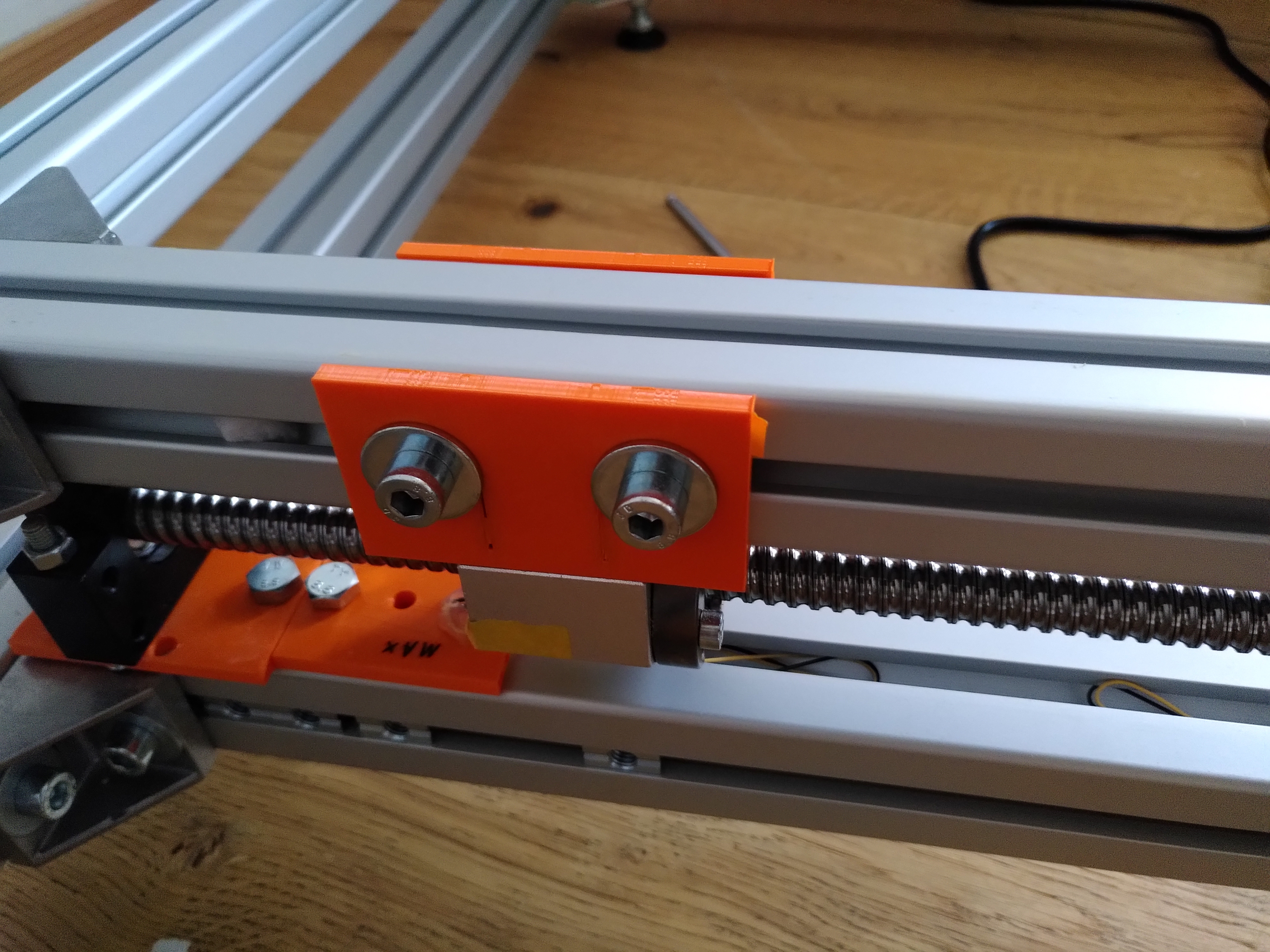
Übergang von Kugelumlaufspindel zum oberen Gestell
Zwischen Motor und Gestell befindet sich ein Gummilager, welches die Schrittgeräusche des Motors vom Gestell entkoppeln soll. Hiermit reduziert sich das Antriebsgeräusch deutlich.
Als Endschalter dienen zwei Reed-Kontakte, die auf 3D-(Fehl)drucken sitzen und sich in der Nut unterhalb des Wellenmutterhalters bewegen lassen. Die passenden Magneten sind auf dem Halter aufgeklebt. So lässt sich der maximale Verfahrweg relativ gut einstellen.
Elektronik
Hier wurde großteilig auf bestehende fertige Module zugegriffen, um die Arbeit etwas zu erleichtern. Ein Arduino Nano dient als CPU, die Software wird später beschrieben.
Der Antrieb des Schrittmotors erfolgt über ein TMC5160 Modul. Dieser Chip ermöglicht durch spezielle Modulation, Teilschritte zu erzeugen ohne dabei in das klassiche PWM-Kreischen, dass der Teilschrittbetrieb mit sich bringt. Es scheint, als würde hier eine Art Raumzeigermodulation verwendet in der das Feld pseudozufällig umgesteuert wird und sich im zeitlichen Mittel die Teilschritte ergeben. In der Tat ist im Betrieb kein Modulationsgeräusch zu hören.
Dies bedeutet leider nicht, dass auch die (Teil-)Schritte nicht zu hören sind. Zwar kann auch hier der Motorcontroller interpolieren und das Geräusch ist wirklich akzeptabel, aber geräuschlos geht anders. Um den Schallpegel weiter zu senken, es geht ja ums Einschalfen, wurde der Motor mit einem Gummilager mit dem Gestell verbunden. Auch der Riementrieb sollte hier Entkopplung bringen.
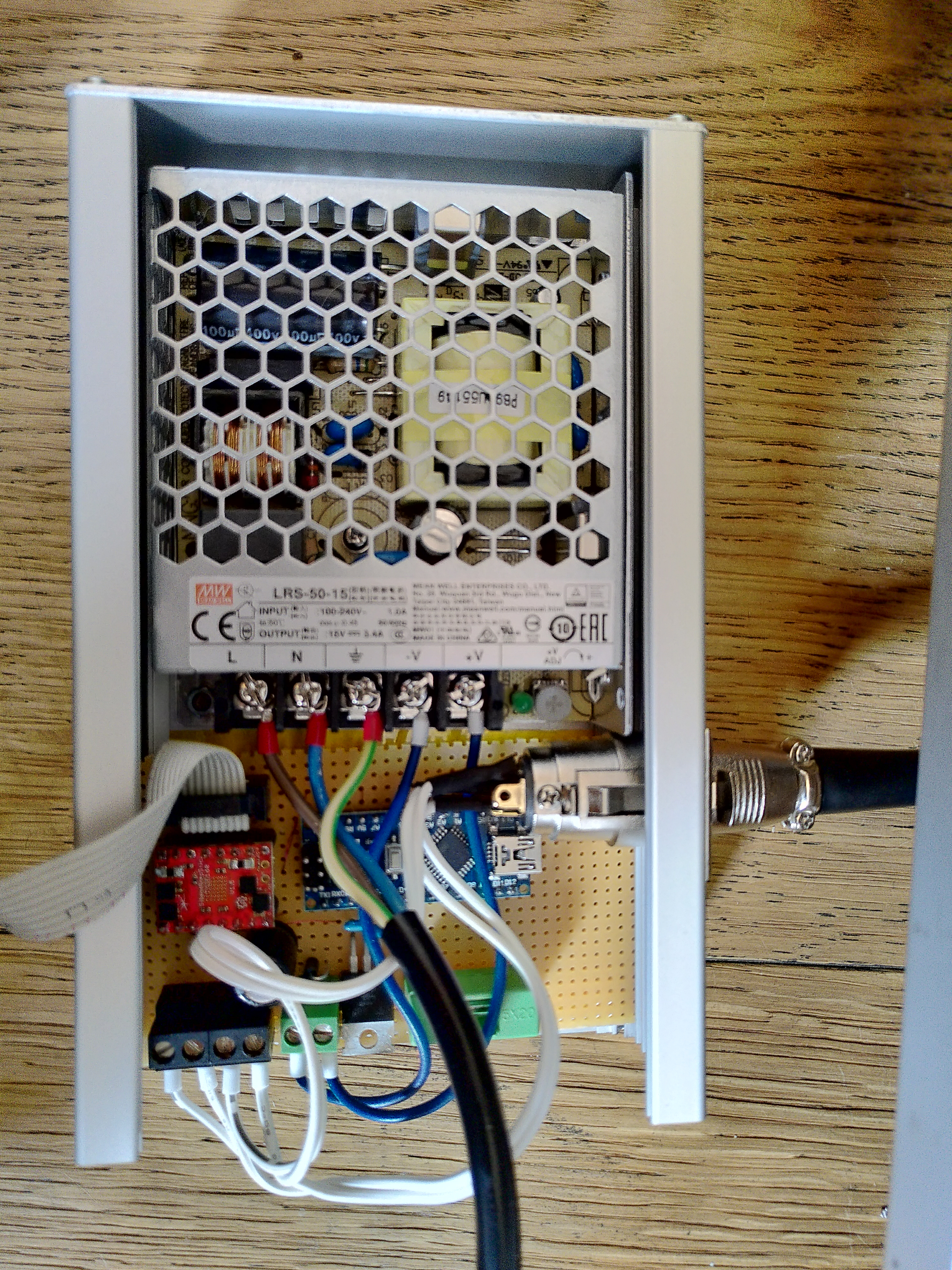
Vorläufiger Aufbau der Elektronik
Das Netzteil passt mitsamt Controller in ein Standardgehäuse. Die Anschlüsse in Form von DB-9 für die Endschaltersignale und 5-Pol XLR sind robust ausgelegt und sollten hoffentlich den harten Alltag im Kinderzimmer überleben. Das Stromversorgungskabel wird mittels einer geschraubten Kabeldurchführung fixiert und sollte damit auch kein Sicherheitsrisiko darstellen.
Software
Die Software ist momentan die größte Baustelle. Gerade das Benutzerinterface sollte tauglich sein, auch von übermüdeten Erwachsenen bedient zu werden, ohne dabei die Aufmerksamkeit des Juniors zu sehr auf sich zu lenken.
Gegenwärtig ist die Bewegungssteuerung quasi fertig implementiert. Diese fährt beim Starten des Controllers zunächst beide Endschalter an.
Der Schaukelbetrieb kann auch Teilstücke des Bett-Weges fahren um so bei gleicher Maximalgeschwindigkeit verschiedene Wiegefrequenzen zu erreichen. Um die Endlagen herum fährt die Software die Geschwindigekeit rampenförmig hoch und herunter, um ein zu hartes Umsteuern zu verhindern. Dieses wäre sowohl für den Filius unangenehm als auch laut und kann auch ggf. durch die Massenträgheit den Motor aus dem Tritt bringen. Das ist dann noch lauter.
Anschließend beginnt das Bett mit einer Schaukelbewegung mit ca. 25% des Gesamtwegs. Dieser Weg und die Schrittfrequenz verringern sich über eine Zeit von ca. 2 Stunden. So klingt die Schaukelbewegung langsam ab.
Downloads
Von den Rahmen, den Lagern, der Spindel und insbesondere von den Adaptern gibt es Skizzen in Solvespace. Insbesondere der Rahmen wurde bei der Montage noch an einigen Stellen etwas gekürzt, sodass dessen Maße hier mit Vorsicht zu genießen sind. Ebenso enthält das Modell den restlichen Antribesstrang (Motor, Lager und Riementrieb) nicht!
Also sind dies nur Inspirationen, wer sich trotzdem nicht abschrecken lässt, findet die Dateien hier.
Der Code für die Motorsteuerung ist hier zu finden.